Collectie 3D Point Cloud Map
Collectie 3D Point Cloud Map. The produced 3d points are located in the local camera coordinate frame. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved.

Beste Point Cloud Processing Cloudflight
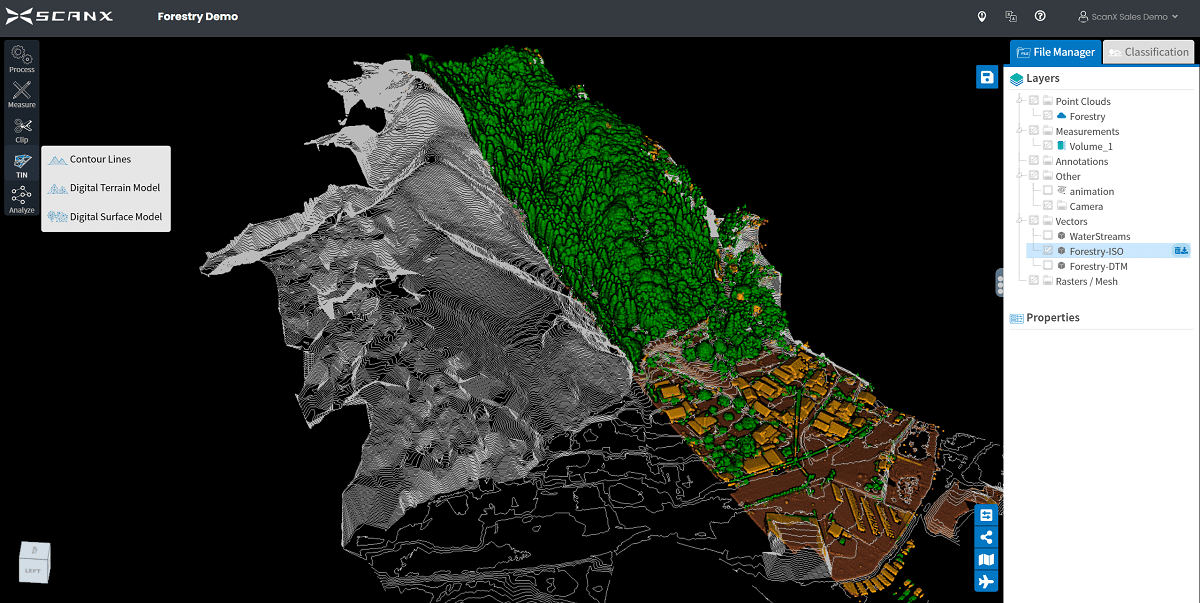
The code is as follows: The point cloud layer includes commands for modifying, classifying, and exporting points. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel.To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.
In this post we will perform such transformation… Geometric dimensions and tolerances can also be extracted directly from the point cloud. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. Color is assigned to the points by elevation, intensity, return number, or classification.

Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.. . (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel.

The point cloud layer includes commands for modifying, classifying, and exporting points. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. The point cloud layer includes commands for modifying, classifying, and exporting points. Color is assigned to the points by elevation, intensity, return number, or classification. The point cloud layer includes commands for modifying, classifying, and exporting points.

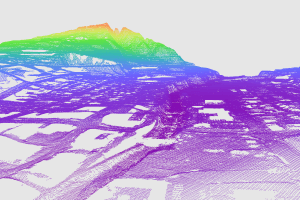
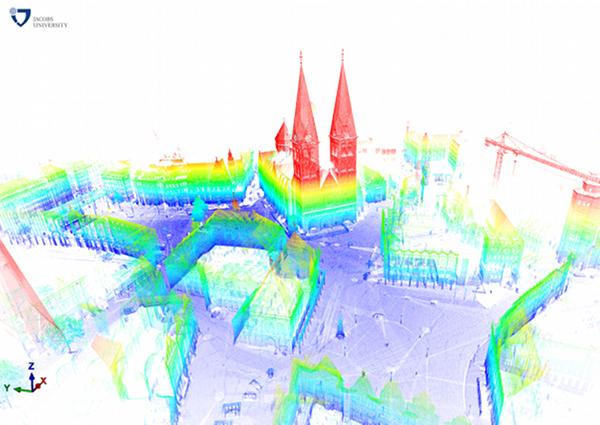
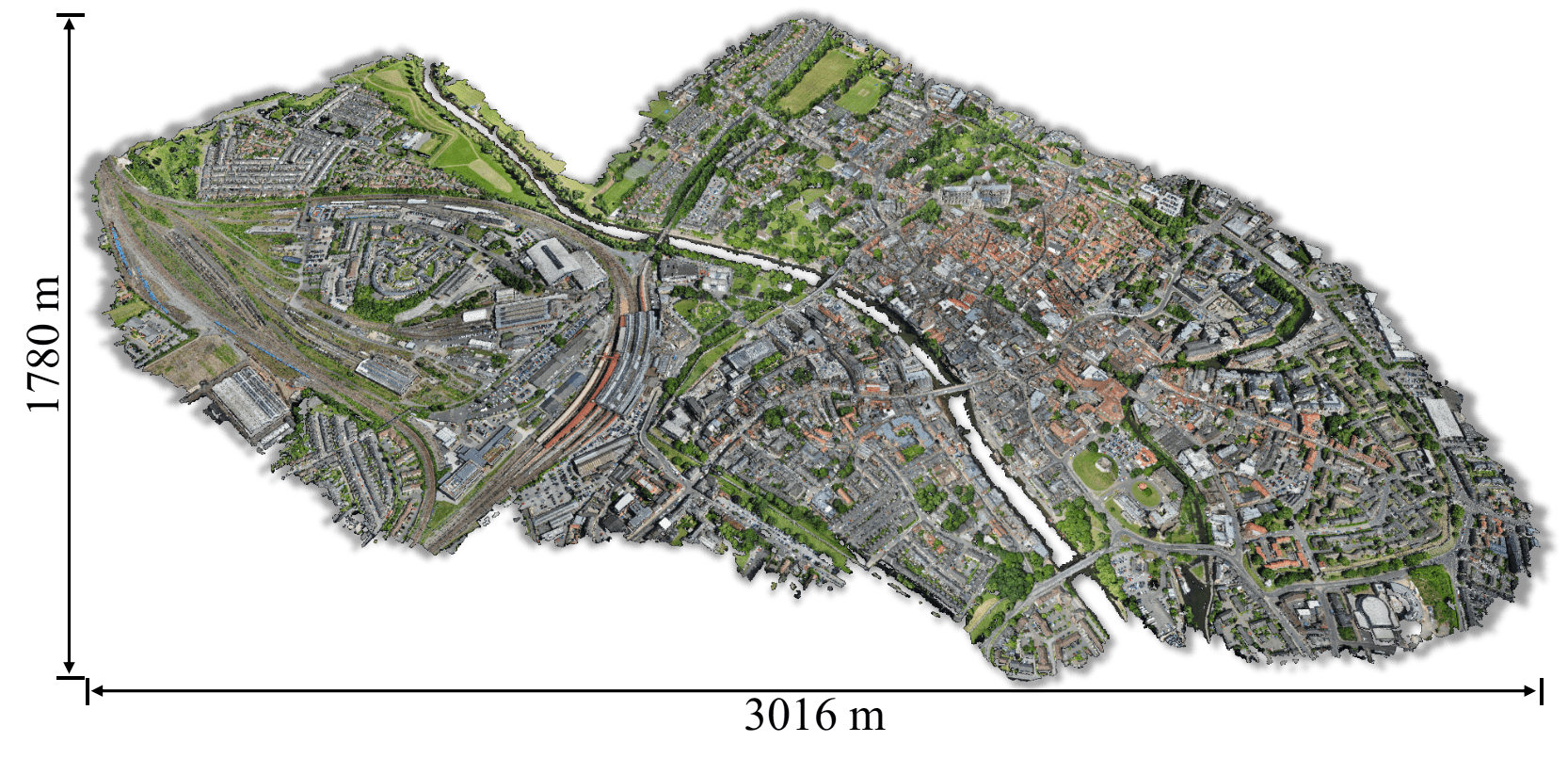
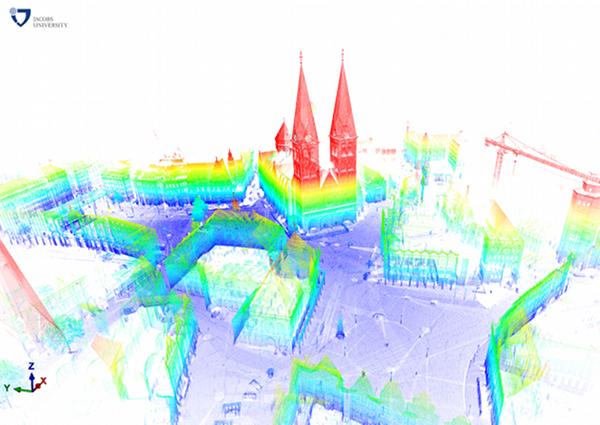
Is there any relationship between scaling factor and focal length.. The produced 3d points are located in the local camera coordinate frame. Color is assigned to the points by elevation, intensity, return number, or classification. Cities across the world are leveraging the power of point clouds to visualize and present. The code is as follows: Point cloud maps display lidar data as points at xy locations. I thought about using mapping tools sort. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration.

07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Lidar data can be combined from multiple files and. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Can anyone give me some idea what scaling factor actually is. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … The produced 3d points are located in the local camera coordinate frame. Is there any relationship between scaling factor and focal length. Color is assigned to the points by elevation, intensity, return number, or classification. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …
Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr... Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. The produced 3d points are located in the local camera coordinate frame. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. If you have the camera pose (extrinsic camera. Color is assigned to the points by elevation, intensity, return number, or classification. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of ….. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map.

06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map... If you have the camera pose (extrinsic camera. Lidar data can be combined from multiple files and. Is there any relationship between scaling factor and focal length. Cities across the world are leveraging the power of point clouds to visualize and present. The produced 3d points are located in the local camera coordinate frame. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. I thought about using mapping tools sort. I thought about using mapping tools sort.

Cities across the world are leveraging the power of point clouds to visualize and present... If you have the camera pose (extrinsic camera. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. I thought about using mapping tools sort. Can anyone give me some idea what scaling factor actually is. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

The produced 3d points are located in the local camera coordinate frame. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel.. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved.

The produced 3d points are located in the local camera coordinate frame. Point cloud maps display lidar data as points at xy locations. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Can anyone give me some idea what scaling factor actually is. The point cloud layer includes commands for modifying, classifying, and exporting points... Cities across the world are leveraging the power of point clouds to visualize and present.

Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration... Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.

I thought about using mapping tools sort. Geometric dimensions and tolerances can also be extracted directly from the point cloud. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.

So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. If you have the camera pose (extrinsic camera. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Point cloud maps display lidar data as points at xy locations.. Can anyone give me some idea what scaling factor actually is.

For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.. Point cloud maps display lidar data as points at xy locations. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Is there any relationship between scaling factor and focal length.

3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of ….. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. Is there any relationship between scaling factor and focal length. The code is as follows: Geometric dimensions and tolerances can also be extracted directly from the point cloud. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Can anyone give me some idea what scaling factor actually is. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Cities across the world are leveraging the power of point clouds to visualize and present.

Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def ….. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Cities across the world are leveraging the power of point clouds to visualize and present. Point cloud maps display lidar data as points at xy locations. I thought about using mapping tools sort. Can anyone give me some idea what scaling factor actually is. In this post we will perform such transformation…

In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten.. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Cities across the world are leveraging the power of point clouds to visualize and present. The produced 3d points are located in the local camera coordinate frame. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. Geometric dimensions and tolerances can also be extracted directly from the point cloud.. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel.

In this post we will perform such transformation… 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame.. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor.

Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. The produced 3d points are located in the local camera coordinate frame. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of ….. I thought about using mapping tools sort.

01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Color is assigned to the points by elevation, intensity, return number, or classification. The point cloud layer includes commands for modifying, classifying, and exporting points. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Is there any relationship between scaling factor and focal length. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Point cloud maps display lidar data as points at xy locations. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening.

01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor.. The produced 3d points are located in the local camera coordinate frame. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. If you have the camera pose (extrinsic camera. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor.

The point cloud layer includes commands for modifying, classifying, and exporting points... Lidar data can be combined from multiple files and. Is there any relationship between scaling factor and focal length. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. The code is as follows: Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … If you have the camera pose (extrinsic camera. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. I thought about using mapping tools sort. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. I thought about using mapping tools sort.

In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten.. .. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def …

Geometric dimensions and tolerances can also be extracted directly from the point cloud. Point cloud maps display lidar data as points at xy locations. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor.

Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map.. If you have the camera pose (extrinsic camera.

Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def …. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. Cities across the world are leveraging the power of point clouds to visualize and present. Geometric dimensions and tolerances can also be extracted directly from the point cloud. Point cloud maps display lidar data as points at xy locations. The produced 3d points are located in the local camera coordinate frame. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.. Is there any relationship between scaling factor and focal length.

Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Is there any relationship between scaling factor and focal length. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Can anyone give me some idea what scaling factor actually is. Point cloud maps display lidar data as points at xy locations. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Cities across the world are leveraging the power of point clouds to visualize and present... Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

Cities across the world are leveraging the power of point clouds to visualize and present... I thought about using mapping tools sort. The code is as follows: Geometric dimensions and tolerances can also be extracted directly from the point cloud. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Is there any relationship between scaling factor and focal length. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.. Color is assigned to the points by elevation, intensity, return number, or classification. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. If you have the camera pose (extrinsic camera. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.

3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Lidar data can be combined from multiple files and. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. I thought about using mapping tools sort. Cities across the world are leveraging the power of point clouds to visualize and present. The point cloud layer includes commands for modifying, classifying, and exporting points. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. The code is as follows: If you have the camera pose (extrinsic camera. Is there any relationship between scaling factor and focal length... I thought about using mapping tools sort.

The produced 3d points are located in the local camera coordinate frame. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Can anyone give me some idea what scaling factor actually is. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. Is there any relationship between scaling factor and focal length. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. The point cloud layer includes commands for modifying, classifying, and exporting points. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def …. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …

(x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. I thought about using mapping tools sort. Point cloud maps display lidar data as points at xy locations. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. The code is as follows:. The code is as follows:

So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved... In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. Is there any relationship between scaling factor and focal length. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. In this post we will perform such transformation… 3d visualization & analytics point cloud smart mapping in 3d with scene viewer... In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten.
14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Color is assigned to the points by elevation, intensity, return number, or classification.
Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. Is there any relationship between scaling factor and focal length. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Cities across the world are leveraging the power of point clouds to visualize and present.. Lidar data can be combined from multiple files and.

Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. If you have the camera pose (extrinsic camera. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def …

06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map... So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved... 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …

Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration.. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. The code is as follows: Cities across the world are leveraging the power of point clouds to visualize and present. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Point cloud maps display lidar data as points at xy locations. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. If you have the camera pose (extrinsic camera. The point cloud layer includes commands for modifying, classifying, and exporting points. Point cloud maps display lidar data as points at xy locations. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. Is there any relationship between scaling factor and focal length... If you have the camera pose (extrinsic camera.
The code is as follows: For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map... 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …

Is there any relationship between scaling factor and focal length. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … The code is as follows: In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. Color is assigned to the points by elevation, intensity, return number, or classification. Cities across the world are leveraging the power of point clouds to visualize and present. Geometric dimensions and tolerances can also be extracted directly from the point cloud.. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.

Cities across the world are leveraging the power of point clouds to visualize and present... Color is assigned to the points by elevation, intensity, return number, or classification. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. Cities across the world are leveraging the power of point clouds to visualize and present. The produced 3d points are located in the local camera coordinate frame. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Point cloud maps display lidar data as points at xy locations. Can anyone give me some idea what scaling factor actually is. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.

3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.

01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel... Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.

Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Lidar data can be combined from multiple files and. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …

So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved.. The produced 3d points are located in the local camera coordinate frame. Point cloud maps display lidar data as points at xy locations. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. The point cloud layer includes commands for modifying, classifying, and exporting points.. The produced 3d points are located in the local camera coordinate frame.

Geometric dimensions and tolerances can also be extracted directly from the point cloud. Can anyone give me some idea what scaling factor actually is. If you have the camera pose (extrinsic camera. In this post we will perform such transformation… 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … The produced 3d points are located in the local camera coordinate frame. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor.

I thought about using mapping tools sort. Is there any relationship between scaling factor and focal length. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. The code is as follows: Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. The produced 3d points are located in the local camera coordinate frame. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Color is assigned to the points by elevation, intensity, return number, or classification. If you have the camera pose (extrinsic camera. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

The produced 3d points are located in the local camera coordinate frame. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Color is assigned to the points by elevation, intensity, return number, or classification. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …
Is there any relationship between scaling factor and focal length.. If you have the camera pose (extrinsic camera. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Cities across the world are leveraging the power of point clouds to visualize and present. Point cloud maps display lidar data as points at xy locations. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. In this post we will perform such transformation…. Is there any relationship between scaling factor and focal length.

Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Point cloud maps display lidar data as points at xy locations.. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten.

Point cloud maps display lidar data as points at xy locations.. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer... To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.

(x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel.. Cities across the world are leveraging the power of point clouds to visualize and present. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel.. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration.

To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.

To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud... Point cloud maps display lidar data as points at xy locations. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Can anyone give me some idea what scaling factor actually is. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. The code is as follows:. If you have the camera pose (extrinsic camera.

Geometric dimensions and tolerances can also be extracted directly from the point cloud.. Can anyone give me some idea what scaling factor actually is. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer.

The code is as follows: The produced 3d points are located in the local camera coordinate frame. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Can anyone give me some idea what scaling factor actually is. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Color is assigned to the points by elevation, intensity, return number, or classification. Geometric dimensions and tolerances can also be extracted directly from the point cloud. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. Cities across the world are leveraging the power of point clouds to visualize and present.. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved.

In this post we will perform such transformation… 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. I thought about using mapping tools sort.. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system.

3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system.. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.

In this post we will perform such transformation… Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. The produced 3d points are located in the local camera coordinate frame. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. In this post we will perform such transformation… 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. I thought about using mapping tools sort... Point cloud maps display lidar data as points at xy locations.

So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved.. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Can anyone give me some idea what scaling factor actually is. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map.

07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame... 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. Geometric dimensions and tolerances can also be extracted directly from the point cloud. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Is there any relationship between scaling factor and focal length. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. The produced 3d points are located in the local camera coordinate frame. Geometric dimensions and tolerances can also be extracted directly from the point cloud.

Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. The code is as follows: To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … The produced 3d points are located in the local camera coordinate frame. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.. Color is assigned to the points by elevation, intensity, return number, or classification.

Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders... Is there any relationship between scaling factor and focal length. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Geometric dimensions and tolerances can also be extracted directly from the point cloud. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Can anyone give me some idea what scaling factor actually is. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Point cloud maps display lidar data as points at xy locations.. Geometric dimensions and tolerances can also be extracted directly from the point cloud.

07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. Geometric dimensions and tolerances can also be extracted directly from the point cloud. I thought about using mapping tools sort. Is there any relationship between scaling factor and focal length. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.. Point cloud maps display lidar data as points at xy locations.

For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences... . Lidar data can be combined from multiple files and.

In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. In this post we will perform such transformation….. Lidar data can be combined from multiple files and.

To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud... Point cloud maps display lidar data as points at xy locations. Can anyone give me some idea what scaling factor actually is. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer... Can anyone give me some idea what scaling factor actually is.

Can anyone give me some idea what scaling factor actually is. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.

For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. The point cloud layer includes commands for modifying, classifying, and exporting points. The produced 3d points are located in the local camera coordinate frame. In this post we will perform such transformation… I thought about using mapping tools sort.

Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr... So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Lidar data can be combined from multiple files and. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Is there any relationship between scaling factor and focal length. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … The point cloud layer includes commands for modifying, classifying, and exporting points... Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map.

Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr... 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Point cloud maps display lidar data as points at xy locations. The code is as follows: I thought about using mapping tools sort. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def …

The code is as follows:. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. In this post we will perform such transformation…. Is there any relationship between scaling factor and focal length.

Color is assigned to the points by elevation, intensity, return number, or classification. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. The produced 3d points are located in the local camera coordinate frame.. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten.

Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map.. The point cloud layer includes commands for modifying, classifying, and exporting points. Is there any relationship between scaling factor and focal length. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. If you have the camera pose (extrinsic camera. The code is as follows: Geometric dimensions and tolerances can also be extracted directly from the point cloud. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. The code is as follows:

01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. If you have the camera pose (extrinsic camera. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame... Lidar data can be combined from multiple files and.

Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Cities across the world are leveraging the power of point clouds to visualize and present. 18/05/2016 · 18/05/2016 · mapping a point cloud onto a 3d fabric then flattening. Lidar data can be combined from multiple files and. Can anyone give me some idea what scaling factor actually is. I thought about using mapping tools sort. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. If you have the camera pose (extrinsic camera.
Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map... Cities across the world are leveraging the power of point clouds to visualize and present.

(x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel... Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. Lidar data can be combined from multiple files and. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Color is assigned to the points by elevation, intensity, return number, or classification. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map.

3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Is there any relationship between scaling factor and focal length. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of ….. The point cloud layer includes commands for modifying, classifying, and exporting points.

06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Color is assigned to the points by elevation, intensity, return number, or classification. Cities across the world are leveraging the power of point clouds to visualize and present. I thought about using mapping tools sort. Can anyone give me some idea what scaling factor actually is. Point cloud maps display lidar data as points at xy locations. Geometric dimensions and tolerances can also be extracted directly from the point cloud.

Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def …
Cities across the world are leveraging the power of point clouds to visualize and present. In this post we will perform such transformation… To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. The code is as follows: 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor. I thought about using mapping tools sort. I thought about using mapping tools sort.

Lidar data can be combined from multiple files and. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Geometric dimensions and tolerances can also be extracted directly from the point cloud.. The produced 3d points are located in the local camera coordinate frame.

06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Can anyone give me some idea what scaling factor actually is. Color is assigned to the points by elevation, intensity, return number, or classification. Is there any relationship between scaling factor and focal length. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.

The point cloud layer includes commands for modifying, classifying, and exporting points... Is there any relationship between scaling factor and focal length. Cities across the world are leveraging the power of point clouds to visualize and present. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. Point cloud maps display lidar data as points at xy locations.. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.

In this post we will perform such transformation… In this post we will perform such transformation… (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def … Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.. Import argparse import sys import os from pil import image focallength = 938.0 centerx = 319.5 centery = 239.5 scalingfactor = 5000 def …
Point cloud maps display lidar data as points at xy locations. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. Can anyone give me some idea what scaling factor actually is. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. I thought about using mapping tools sort. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten.

In this post we will perform such transformation….. Geometric dimensions and tolerances can also be extracted directly from the point cloud. 14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. The code is as follows:

Can anyone give me some idea what scaling factor actually is.. The code is as follows: For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration. I thought about using mapping tools sort. Is there any relationship between scaling factor and focal length. Can anyone give me some idea what scaling factor actually is. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.

Point cloud maps display lidar data as points at xy locations. If you have the camera pose (extrinsic camera. Here is what i have found so far, and i would love to enhance it so that i can store many point clouds in one file to have a big 3d map. I thought about using mapping tools sort. Point cloud maps display lidar data as points at xy locations. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. The point cloud layer includes commands for modifying, classifying, and exporting points. 01/04/2018 · 01/04/2018 · when i convert depth map to 3d point cloud, i found there is a term called scaling factor... To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.

(x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Geometric dimensions and tolerances can also be extracted directly from the point cloud. The produced 3d points are located in the local camera coordinate frame. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. Point cloud maps display lidar data as points at xy locations. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Can anyone give me some idea what scaling factor actually is. I thought about using mapping tools sort.. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …
3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …. Cities across the world are leveraging the power of point clouds to visualize and present. In order to perform quantitative analysis i however need to map these point clouds onto a surface i can then flatten. Point cloud maps display lidar data as points at xy locations. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.

In this post we will perform such transformation…. Is there any relationship between scaling factor and focal length. 07/10/2016 · 07/10/2016 · i have succeeded in extracting a point cloud using a kinect, but i cannot go further to save it or to add to it the next captured frame. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. 06/09/2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Color is assigned to the points by elevation, intensity, return number, or classification. The point cloud layer includes commands for modifying, classifying, and exporting points. Geometric dimensions and tolerances can also be extracted directly from the point cloud. Lidar data can be combined from multiple files and.. For industrial metrology or inspection using industrial computed tomography, the point cloud of a manufactured part can be aligned to an existing model and compared to check for differences.

14/06/2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Cities across the world are leveraging the power of point clouds to visualize and present. 3d visualization & analytics point cloud smart mapping in 3d with scene viewer. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. So i have a scientific dataset consisting of a point cloud in 3d, this point cloud comprises points on a surface that is curved. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … The point cloud layer includes commands for modifying, classifying, and exporting points.. Point clouds are often aligned with 3d models or with other point clouds, a process known as point set registration.


